1 Introduction Coolant water is the basic system of the factory's public works. The refrigerant water pressure control system based on plc and frequency converter has the advantages of high automation, high efficiency, energy saving, safety and health, and easy maintenance; it adopts frofibus bus technology and has high scalability; the host computer control system has dynamic display of process pictures, process management and printing. And other advanced features.
2 System Principle Design 2.1 System General (1) The objective of the target design system design is to use plc automatic control technology to maintain the stability of the water supply pressure of the pipeline network in order to achieve energy conservation and emission reduction and reduce .
(2) Scheme design Each chiller is equipped with 2 pumps. When the chiller is in normal operation, any one of them operates in the speed regulation state, while the other pump is in standby mode and can be put into operation at any time. The operation of the two pumps is switched manually and requires that the two pumps interlock and cannot be put into operation at the same time. In order to make the average working time of each pump the same, you need to set the timing pump change function. After the scheduled pump change function is set, when a pump continuously works longer than the set value, and the pump is in the "rest" state, the system prompts pump change to ensure that each pump runs at equal time and extends the service life of the pump. . When the inverter fails, it can automatically switch to the power frequency to continue operation to ensure that the water supply is uninterrupted.
(3) Function Design System With alarm function, real-time monitoring and data storage and other functions. The alarm display includes over-limit alarms and fault alarms. When the preset monitored analog value exceeds the specified limit value or the switch status jumps to the alarm position, a limit violation alarm is generated. When a preset monitoring device or process fails, the control system fails and a fault alarm occurs. Once an alarm event occurs, the alarm signal is uploaded to the upper computer and the buzzer is also connected to make an alarm. The alarm records show different colors. The upper IPC stores real-time status such as opening, closing or failure of each pump, and real-time data such as temperature, outlet pressure, valve opening, and pump speed, and can perform quick report query and printing.
2.2 System Composition This system design includes the upper computer, local touch screen and lower computer. The upper computer displays the process flow display, parameter group display, equipment operating status display, dynamic display of refrigerant water temperature, pressure, and pump speed. At the same time with high-speed historical data storage and query, alarm and other functions. The local touch screen can also dynamically display coolant water temperature, pressure, and pump speed. The lower machine plc realizes the automatic control of refrigerant water.
The lower position system adopts Siemens s-7200plc, abb frequency changer, pressure sensor, temperature sensor, analog regulating valve and other control equipment. Plc control part, because the system has 6 analog input, 4 analog output, need to use the expansion unit, so choose the host for a cpu224plc, plus two analog output module em232, and then expand an analog i/o Module em235. Using em277frofibus-dp module to communicate with the host computer [1]. This module is used to accept the host computer instructions and upload alarm signals.
2.3 Control Principles The system adopts two-way pid closed-loop control. According to the data measured by the pressure gauge, the proportional valve and the pump speed are respectively adjusted to ensure that the refrigerant pressure on the job is stable, and the entire system reaches the most energy-saving. System block diagram shown in Figure 1.

Figure 1 System Schematic In the open operation of the freezer, the control system controls the refrigerant water circulation pump according to the constant flow, at this time the pump speed is set to the maximum, the pressure sensor detects the pressure of the pipe network, and outputs the current signal of 4-20mA to the plc. The pressure feedback signal and the pressure given signal are calculated by the fuzzy pid control program, and the control signal is output to the analog regulating valve. When the pressure is insufficient, reduce the opening of the analog control valve, reduce the return of refrigerant water, thereby increasing the water pressure; otherwise increase the analog control valve opening, increase the return of refrigerant water, reduce the outlet pressure. When the freezer stops operating and the temperature of the refrigerant water reaches the set temperature, the control system automatically controls the refrigerant pump to switch to variable flow constant pressure. At this point the analog control valve is closed, the pressure feedback signal and the pressure reference signal are calculated by another fuzzy pid control program inside the plc, and a speed control signal is output to the frequency converter. When the pressure is insufficient, the frequency converter increases the output frequency, the pump speed increases, and the water supply increases, forcing the outlet pressure to rise. Conversely, the speed of the water pump is slowed down, the amount of water supply is reduced, and the outlet pressure is decreased, so as to ensure that the refrigerant water pressure is stable. The system keeps the outlet pressure stable at 0.4mpa, thus ensuring the working efficiency of the freezer. The pressure adjustment accuracy is ± 5% of the set value, ie ±0.02 mPa, and the pressure that can change within 0.5-2 seconds returns to normal.
3 refrigerant water temperature fuzzy pid controller
3.1 fuzzy pid control features
The classic pid closed-loop algorithm is difficult to achieve the control convergence of the refrigerant water pressure regulation system. The fuzzy PID control uses the current control deviation, combines the changes in the dynamic characteristics of the controlled process, and according to the actual experience of the specific process, according to a certain control requirements or objective function, the control parameters are determined through fuzzy rule inference to realize the control of the system.
The fuzzy control has a weak dependence on the mathematical model and does not require the establishment of an accurate mathematical model of the process. Fuzzy control has better control effect on the dynamic process of the system, but the static error of the system cannot be eliminated. Therefore, for the respective characteristics of the fuzzy control and the pid control, applying the pid control combined with the fuzzy control method to achieve the stepwise control of the system will achieve a good control effect.
3.2 fuzzy pid control process
Due to the uncertainty of users' water demand and the large fluctuation of water pressure in the pipeline network, the mathematical model is difficult to determine. The fuzzy control does not require an accurate mathematical model. Therefore, the fuzzy control method [2]-[4] is adopted for the pressure control algorithm. design.
The fuzzy pid control takes the error e and the error change ec as input, is described by fuzzy language after being fuzzified, and uses the fuzzy control rule to judge the true value of the control amount, and the output variable is u, which is the control current of 4-20 ma. The working process of the fuzzy controller can be described as follows: First, the fuzzy controller's input is converted into a fuzzy quantity for use in the fuzzy control logic decision system. The fuzzy decision-maker determines the fuzzy relationship r according to the control rules, and is applied to the fuzzy logic inference algorithm. The controller's fuzzy output, and finally the accurate control of the controlled object to be controlled. Fuzzy pid control diagram shown in Figure 2.
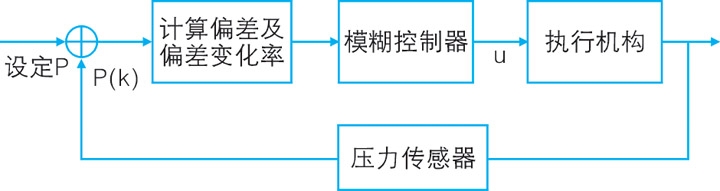
Figure 2 fuzzy pid control block diagram
The fuzzy linguistic variables for differential pressure e, differential pressure change rate ec, and control volume u are e, ec, and u, respectively, and the fuzzy linguistic values ​​of the fuzzy linguistic variables are: {nb, nm, ns, zo, ps, pm, Pb}, which means {negative, negative, negative, zero, positive, median, or positive}. The number of elements in the general fuzzy universe is 2 times that of the fuzzy language, so the fuzzy universe is {-6,-5,-4,-3,-2,-1,0,1,2,3 4, 5, 6}. E and ec are fuzzed according to the scale factors ke and kec.
Where n=6, the pipe network pressure change range is 0.3 to 0.5mpa, and the set value is 0.4 mpa, which gives the basic domain of error e∈[-0.1, 0.1]; from experience, it is known that Under normal circumstances the pressure change will not exceed 0.05 mpa/s, so the basic domain of error variation is ec∈[-0.05, 0.05]; therefore, the scale factors of the error e and the error increment ec are respectively 60 and 120. Considering the coverage, sensitivity, and robustness of the domain, the membership function of the system is chosen as a triangular membership function.
Fuzzy control rules are the core of fuzzy control. They can simulate people's reasoning ability based on fuzzy concepts, that is, the process of using language to induce manual control of strategies. The determination of fuzzy control essentially sums up the control experience and results in a fuzzy conditional statement. Use composite conditional statements as: if
e=nl andec=nl
Then u = nl, so that the dynamic response and static characteristics of the system output response are optimal. In this system, since e and ec each have 7 language input values, there are 7×7=49 if-then statements, which can be summarized as fuzzy control rule tables, as shown in the attached table.
4 Conclusion
This article designs a kind of refrigerant water automatic control system based on plc and frequency converter and has the function of remote monitoring. It has the characteristics of fast response, accuracy, convenient operation, convenient maintenance, high efficiency and energy saving. The fuzzy pid controller is applied to the constant voltage control system to make up for the inadequacies of the traditional pid control, improve the system's nonlinearity, large hysteresis and other characteristics, and improve the system's robustness.
2 System Principle Design 2.1 System General (1) The objective of the target design system design is to use plc automatic control technology to maintain the stability of the water supply pressure of the pipeline network in order to achieve energy conservation and emission reduction and reduce .
(2) Scheme design Each chiller is equipped with 2 pumps. When the chiller is in normal operation, any one of them operates in the speed regulation state, while the other pump is in standby mode and can be put into operation at any time. The operation of the two pumps is switched manually and requires that the two pumps interlock and cannot be put into operation at the same time. In order to make the average working time of each pump the same, you need to set the timing pump change function. After the scheduled pump change function is set, when a pump continuously works longer than the set value, and the pump is in the "rest" state, the system prompts pump change to ensure that each pump runs at equal time and extends the service life of the pump. . When the inverter fails, it can automatically switch to the power frequency to continue operation to ensure that the water supply is uninterrupted.
(3) Function Design System With alarm function, real-time monitoring and data storage and other functions. The alarm display includes over-limit alarms and fault alarms. When the preset monitored analog value exceeds the specified limit value or the switch status jumps to the alarm position, a limit violation alarm is generated. When a preset monitoring device or process fails, the control system fails and a fault alarm occurs. Once an alarm event occurs, the alarm signal is uploaded to the upper computer and the buzzer is also connected to make an alarm. The alarm records show different colors. The upper IPC stores real-time status such as opening, closing or failure of each pump, and real-time data such as temperature, outlet pressure, valve opening, and pump speed, and can perform quick report query and printing.
2.2 System Composition This system design includes the upper computer, local touch screen and lower computer. The upper computer displays the process flow display, parameter group display, equipment operating status display, dynamic display of refrigerant water temperature, pressure, and pump speed. At the same time with high-speed historical data storage and query, alarm and other functions. The local touch screen can also dynamically display coolant water temperature, pressure, and pump speed. The lower machine plc realizes the automatic control of refrigerant water.
The lower position system adopts Siemens s-7200plc, abb frequency changer, pressure sensor, temperature sensor, analog regulating valve and other control equipment. Plc control part, because the system has 6 analog input, 4 analog output, need to use the expansion unit, so choose the host for a cpu224plc, plus two analog output module em232, and then expand an analog i/o Module em235. Using em277frofibus-dp module to communicate with the host computer [1]. This module is used to accept the host computer instructions and upload alarm signals.
2.3 Control Principles The system adopts two-way pid closed-loop control. According to the data measured by the pressure gauge, the proportional valve and the pump speed are respectively adjusted to ensure that the refrigerant pressure on the job is stable, and the entire system reaches the most energy-saving. System block diagram shown in Figure 1.
Figure 1 System Schematic In the open operation of the freezer, the control system controls the refrigerant water circulation pump according to the constant flow, at this time the pump speed is set to the maximum, the pressure sensor detects the pressure of the pipe network, and outputs the current signal of 4-20mA to the plc. The pressure feedback signal and the pressure given signal are calculated by the fuzzy pid control program, and the control signal is output to the analog regulating valve. When the pressure is insufficient, reduce the opening of the analog control valve, reduce the return of refrigerant water, thereby increasing the water pressure; otherwise increase the analog control valve opening, increase the return of refrigerant water, reduce the outlet pressure. When the freezer stops operating and the temperature of the refrigerant water reaches the set temperature, the control system automatically controls the refrigerant pump to switch to variable flow constant pressure. At this point the analog control valve is closed, the pressure feedback signal and the pressure reference signal are calculated by another fuzzy pid control program inside the plc, and a speed control signal is output to the frequency converter. When the pressure is insufficient, the frequency converter increases the output frequency, the pump speed increases, and the water supply increases, forcing the outlet pressure to rise. Conversely, the speed of the water pump is slowed down, the amount of water supply is reduced, and the outlet pressure is decreased, so as to ensure that the refrigerant water pressure is stable. The system keeps the outlet pressure stable at 0.4mpa, thus ensuring the working efficiency of the freezer. The pressure adjustment accuracy is ± 5% of the set value, ie ±0.02 mPa, and the pressure that can change within 0.5-2 seconds returns to normal.
3 refrigerant water temperature fuzzy pid controller
3.1 fuzzy pid control features
The classic pid closed-loop algorithm is difficult to achieve the control convergence of the refrigerant water pressure regulation system. The fuzzy PID control uses the current control deviation, combines the changes in the dynamic characteristics of the controlled process, and according to the actual experience of the specific process, according to a certain control requirements or objective function, the control parameters are determined through fuzzy rule inference to realize the control of the system.
The fuzzy control has a weak dependence on the mathematical model and does not require the establishment of an accurate mathematical model of the process. Fuzzy control has better control effect on the dynamic process of the system, but the static error of the system cannot be eliminated. Therefore, for the respective characteristics of the fuzzy control and the pid control, applying the pid control combined with the fuzzy control method to achieve the stepwise control of the system will achieve a good control effect.
3.2 fuzzy pid control process
Due to the uncertainty of users' water demand and the large fluctuation of water pressure in the pipeline network, the mathematical model is difficult to determine. The fuzzy control does not require an accurate mathematical model. Therefore, the fuzzy control method [2]-[4] is adopted for the pressure control algorithm. design.
The fuzzy pid control takes the error e and the error change ec as input, is described by fuzzy language after being fuzzified, and uses the fuzzy control rule to judge the true value of the control amount, and the output variable is u, which is the control current of 4-20 ma. The working process of the fuzzy controller can be described as follows: First, the fuzzy controller's input is converted into a fuzzy quantity for use in the fuzzy control logic decision system. The fuzzy decision-maker determines the fuzzy relationship r according to the control rules, and is applied to the fuzzy logic inference algorithm. The controller's fuzzy output, and finally the accurate control of the controlled object to be controlled. Fuzzy pid control diagram shown in Figure 2.
Figure 2 fuzzy pid control block diagram
The fuzzy linguistic variables for differential pressure e, differential pressure change rate ec, and control volume u are e, ec, and u, respectively, and the fuzzy linguistic values ​​of the fuzzy linguistic variables are: {nb, nm, ns, zo, ps, pm, Pb}, which means {negative, negative, negative, zero, positive, median, or positive}. The number of elements in the general fuzzy universe is 2 times that of the fuzzy language, so the fuzzy universe is {-6,-5,-4,-3,-2,-1,0,1,2,3 4, 5, 6}. E and ec are fuzzed according to the scale factors ke and kec.
Where n=6, the pipe network pressure change range is 0.3 to 0.5mpa, and the set value is 0.4 mpa, which gives the basic domain of error e∈[-0.1, 0.1]; from experience, it is known that Under normal circumstances the pressure change will not exceed 0.05 mpa/s, so the basic domain of error variation is ec∈[-0.05, 0.05]; therefore, the scale factors of the error e and the error increment ec are respectively 60 and 120. Considering the coverage, sensitivity, and robustness of the domain, the membership function of the system is chosen as a triangular membership function.
Fuzzy control rules are the core of fuzzy control. They can simulate people's reasoning ability based on fuzzy concepts, that is, the process of using language to induce manual control of strategies. The determination of fuzzy control essentially sums up the control experience and results in a fuzzy conditional statement. Use composite conditional statements as: if
e=nl andec=nl
Then u = nl, so that the dynamic response and static characteristics of the system output response are optimal. In this system, since e and ec each have 7 language input values, there are 7×7=49 if-then statements, which can be summarized as fuzzy control rule tables, as shown in the attached table.
4 Conclusion
This article designs a kind of refrigerant water automatic control system based on plc and frequency converter and has the function of remote monitoring. It has the characteristics of fast response, accuracy, convenient operation, convenient maintenance, high efficiency and energy saving. The fuzzy pid controller is applied to the constant voltage control system to make up for the inadequacies of the traditional pid control, improve the system's nonlinearity, large hysteresis and other characteristics, and improve the system's robustness.
Iron Hydraulic Waste Baler Machine is applicable in steel plants,recycling companies,ferrous & non-ferrous smelting industry to press metal scraps (steel, copper, aluminum, stainless steel, discarded automobiles).
1) Hydraulic drive,manual or PLC control.
2) Bale-discharging:"turn-out","push-out","forward-out" .
3) No footing bolts needed in installation;diesel engine can be power.
4) Spare parts: supply one set of spare parts for free, tool box, operation book.
Iron Shavings Baler, Iron Turnings Baler, Waste Iron Baler, Sheet Iron Baler, Iron Scraps Baler
Jiangyin Metallurgy Hydraulic Machinery Factory , https://www.eco-metalsrecycle.com